
Tentacles Fever
2026
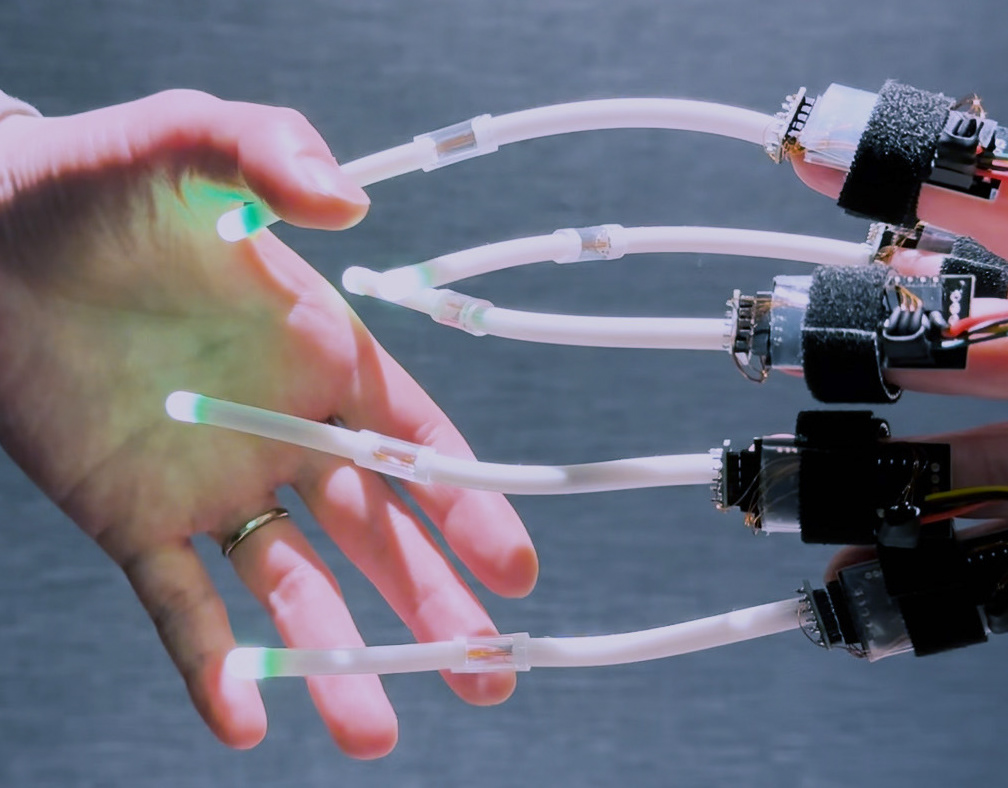
Parasitic Finger
2025

ChoreoFin
2025
ChoreoSurf
2024

ChreoFil
2024
Animated Robotic Sculptures
2020

Tentacle Flora
2018
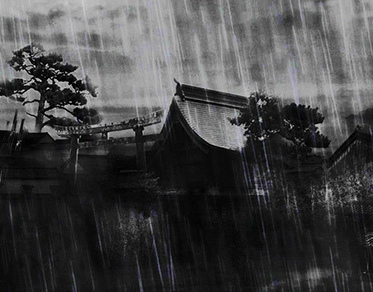
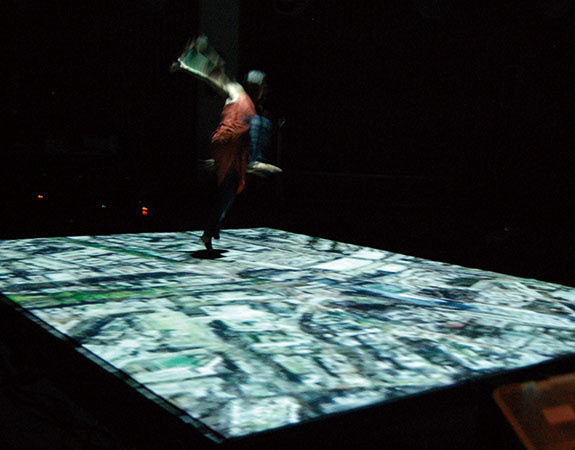
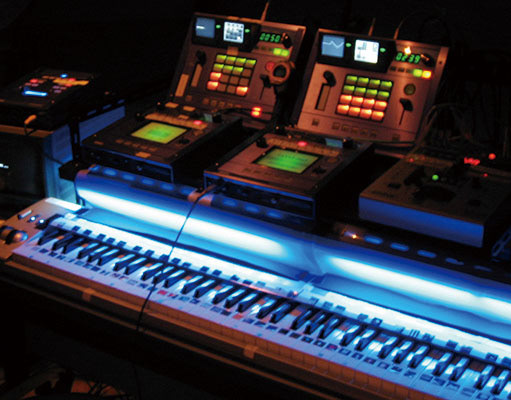
Video & Projection Design 2003-2016
2016
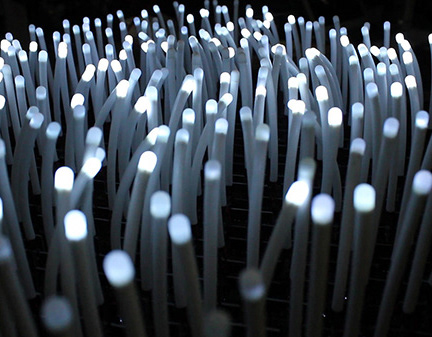
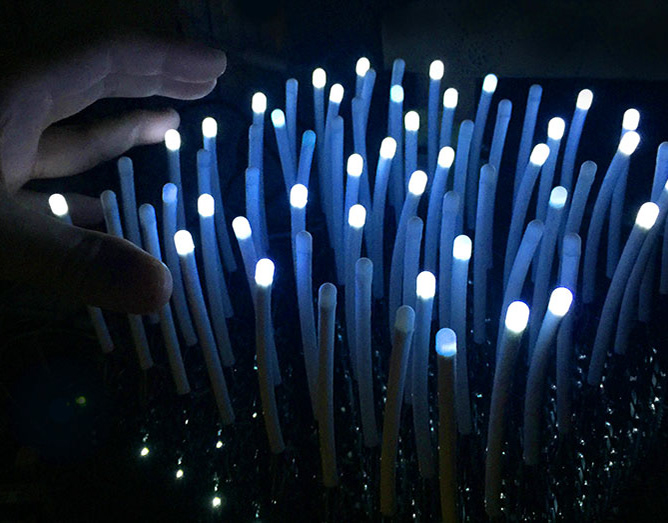
Luminescent Tentacles
2016

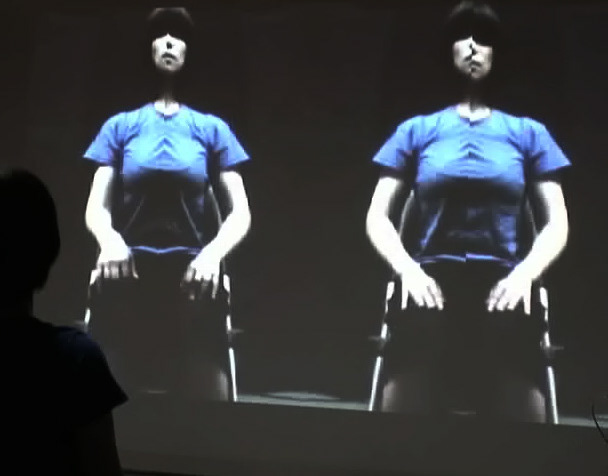
Trio Dialogues
2015
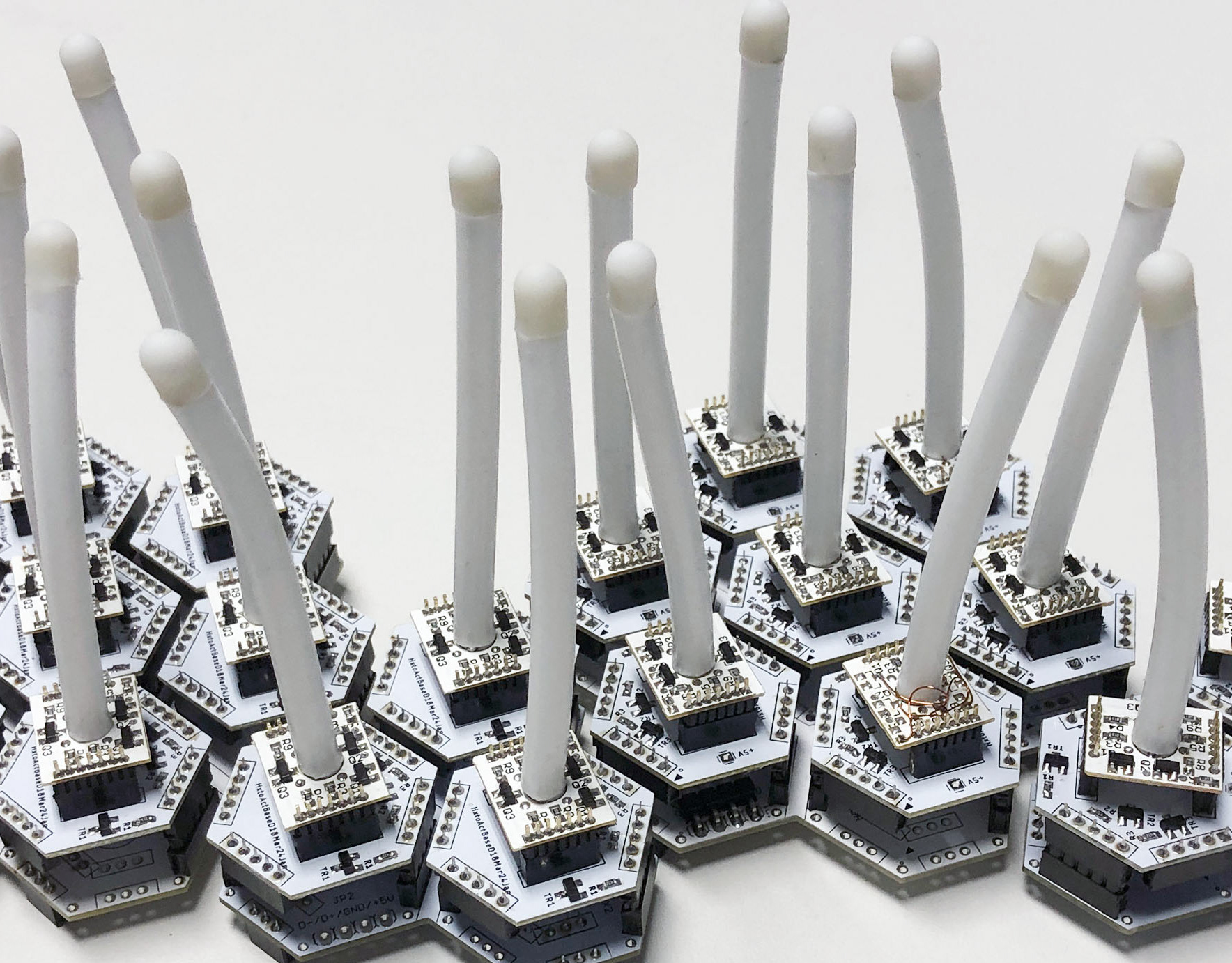
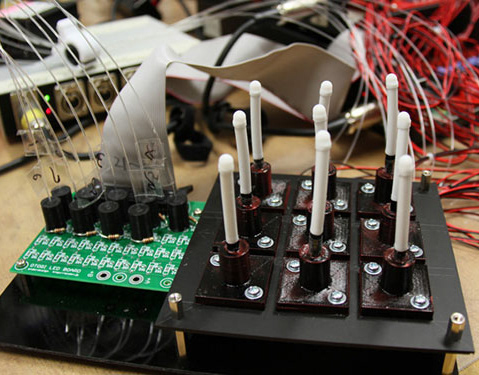
Waving Tentacles 8×8
2015
Waving Tentacles
2014
setPhysical
2010
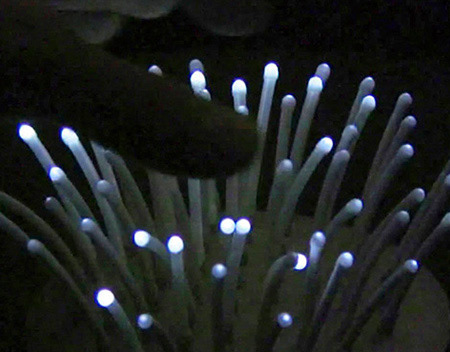
Tentacles
2010

plant
2009

Himawari
2008
physical integration
2007

Ishindenshin
2006
At the time ... On the East Coast
2006

dialogues#8
2005